��Ƭ�C�ڵ����[����ϵ�y�đ���

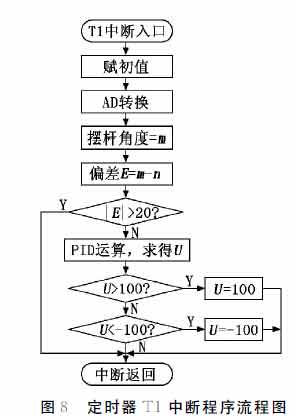
�������У������룩��ڣ낀�ɘӕr�̵�ݔ�����壨�룩��ڣ낀�ɘӕr�̵�ƫ��ֵ���Ԟ�ɘ����ڣ��ˣО�����Ŵ�ϵ�����ԣɞ�e�֕r�g�������ԣĞ��֕r�g������
�����ڌ��r��Ҫ���^�ߵĵ����[ϵ�y�У��e�����ó���ʹϵ�y��ƫ����{��׃����ʹ�ӑB����׃�������Ҫ�M���������������e�����ã�ʹ�ãУ��{��Ҏ�ɼ��ɡ���ԓϵ�y�У�ݔ��׃����o��ֵ�c���H�z�y���ǶȵIJ�ֵ��ݔ��׃���������a���ģУףͲ��ε�ռ�ձȡ��������ۡ��[�U�Լ�늄әC�ĸ�헅������y�ʴ_���գ��Ҹɔ_�^�࣬�y�Խ������_�Ĕ��Wģ�ͣ���˲���ԇ���������Ĕ�ֵ��������ϵ�y���F���Ġ�B���{���������Ĕ�ֵ��ֱ��ϵ�y�_��������
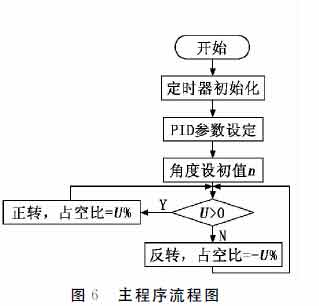
�����������������̈D
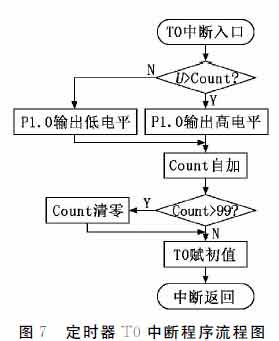
���������[ϵ�y���������̈DҊ�D�������У��՞�Уɣ��\���ݔ��ֵ����ݔ���УףͲ��ε�ռ�ձȣ��������x��Ƭ�C���߂䌣�ãУף�ݔ�����_����Ҫ���ö��r���ԣ�ģ�M�䲨��ݔ�������r���ԣ��Д��ӳ������̈DҊ�D�����ڱ�ϵ�y�У��ɘ������x��飱�������ɶ��r���ԣ����ƣ����r���ԣ��Д��ӳ������̈DҊ�D����
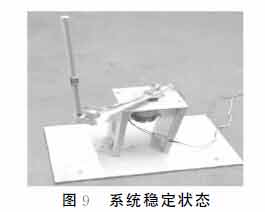
������ϵ�y�yԇ
������ϵ�y�yԇ���õ��ĵ����[ģ�͞����ƺ���ģ�ͣ��yԇ�^�����£��������[�U�������ӽ�������B���c������B����°���ң����oϵ�y��늣�ͬ�r��ȥ�������^�쵽�[�UѸ�ٳʵ�����B�����^�״��{���������L�r�g���ֵ�����B��ϵ�y�_��������B��Ч����D�ڔ[�U���ֵ�����B�r��ʩ��һ�_�ӣ����p���[�U�����ۣ�ϵ�y���^�̕r�g���{��֮���Կ����Ԅ��{����������B���f��ԓϵ�y�߂��^���������ԡ�
�������YՓ
������ϵ�y���Æ�Ƭ�C����һ�A���D�����[ϵ�y�Ŀ������������˔����ɼ�������̎�����Уɣ��\�㣩������ֱ��늙C�\�Р�B�Ȳ������ɹ�ʹԓϵ�y�������佛���Ժ͌����Եõ��˺ܺõ�չ�F��ͬ�rҲ�w�F�˽���УɣĿ�����Փ��һ�A�����[ϵ�y��ʹ�Õr���õĿ���Ч����
�ݣ�Դ��늣��ӣ��W�������ṩ���g֧�����ĵ�ַ��http://www.jssjbk.com/dz/22/15476207263093.shtml
���Ę˺�:
- ��һƪ���£�BLDC늙C�����еĽǶȂ�����
- ��һƪ���£�������RS485�ӿ�оƬ��ͨ���|��
-
 PL2733A ������ͬ������������
PL2733A ������ͬ������������
�P�I�~�� ���ٙ�Ŀ��Ԫ����֪�R -
JD6621 ���ٳ�늅f�h��USB-PD 3.0�cPPS������
�P�I�~�� ���ٙ�Ŀ��Ԫ����֪�R -
FP6601AA USB Type-A ���ٳ�늅f�h������
�P�I�~�� ���ٙ�Ŀ��Ԫ����֪�R -
FP6606C USB���-C��PD��늿�����
�P�I�~�� ���ٙ�Ŀ��Ԫ����֪�R -
FP6601A Type-A HVDCP �������c����/ݔ���Ԅәz�y
�P�I�~�� ���ٙ�Ŀ��Ԫ����֪�R -
JD6608 USB-PD 3.0�cPPS������
�P�I�~�� ���ٙ�Ŀ��Ԫ����֪�R -
FP6606AC USB�p�˿ڳ�늿�����
�P�I�~�� ���ٙ�Ŀ��Ԫ����֪�R -
PL513/PL515 ��/�p�� USB ��늅f�h�˿ڿ�����
�P�I�~�� ���ٙ�Ŀ��Ԫ����֪�R -
JD6606S USB-PD 3.0��HVDCP������
�P�I�~�� ���ٙ�Ŀ��Ԫ����֪�R -
 ·�������_�P��ô�{��
·�������_�P��ô�{��
�P�I�~�� ���ٙ�Ŀ���_�P�Դ�·�D -
 �r���_�P����380v��ô�Ӿ���
�r���_�P����380v��ô�Ӿ���
�P�I�~�� ���ٙ�Ŀ���_�P�Դ�·�D -
 ����·����������ô�Ӿ���
����·����������ô�Ӿ���
�P�I�~�� ���ٙ�Ŀ���_�P�Դ�·�D -
 ·����������ô�Ӿ���
·����������ô�Ӿ���
·�����������ַQ·�������_�P�����Ԍ��F�����քӽ��|·�����_�P��ʹ���֙C��·���M���_���P���ƣ����Ҳ�����⡢ɽ�������������ص�Ӱ푣��e�ǹ��L������ѩ������·��
�P�I�~�� ���ٙ�Ŀ���_�P�Դ�·�D -
 LEDȫ�ʺ���������ô�Ӿ���
LEDȫ�ʺ���������ô�Ӿ���
LEDȫ�ʺ����������ַQLEDȫ����������������Կ�����LEDȫ�ʟ���׃�Q��ͬ���@ʾЧ����T1-1000MINI LEDȫ�ʿ�������������ͨ���Iʽ�Ŀ��������������{���B�ӹ��ܣ��Ɍ��F
�P�I�~�� ���ٙ�Ŀ���_�P�Դ�·�D -
 ��Ό��F�h���_�P���ƣ�
��Ό��F�h���_�P���ƣ�
�P�I�~�� ���ٙ�Ŀ���_�P�Դ�·�D -
 ·����������ô�O�ã�
·����������ô�O�ã�
·���������������քӽ��|·�����_�P��������⡢ɽ�������������ص�Ӱ푣����L������ѩ��ⶼ�������˹����|·���_�P��ʹ���֙C��·���M���_�P�ء��ơ�·���h�̿����_�P��
�P�I�~�� ���ٙ�Ŀ���_�P�Դ�·�D -
 ����h�̿����Դ�_�P��
����h�̿����Դ�_�P��
�P�I�~�� ���ٙ�Ŀ���_�P�Դ�·�D -
 ·����Ό��F�h�̿���?
·����Ό��F�h�̿���?
�P�I�~�� ���ٙ�Ŀ���_�P�Դ�·�D -
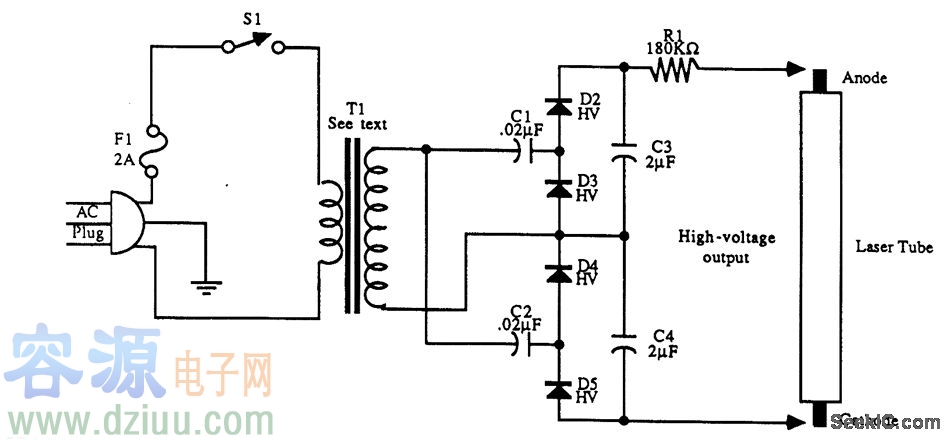 �������Ƶĺ����Դ�·
�������Ƶĺ����Դ�·
T1��һ��60��Ɲ��120����1000������׃������C1, C2, C3, C4, D2ͨ�^D5�γ�һ���ı�늉��������늉���4��5ǧ����������ܰl��r늉��½��� :
�P�I�~�� ���ٙ�Ŀ���·�D -
 ��ô�h�̿����Դ�_�P��
��ô�h�̿����Դ�_�P��
�h�̿����Դ�_�P�����ܾ��x�Լ����g�����ƣ��������֙C�ό��Դ�_�P�M�п��ƣ�ʹ���h�̿����_�P�Ϳ��Ԍ��F�ġ��h�̿����_�P��ֻҪ��4G��̖�ĵط������Բ��ܾ��x���ƣ�����
�P�I�~�� ���ٙ�Ŀ���_�P�Դ�·�D
������dȤ��
- ������
-
- �oԴ�����x�� 2024-10-10
- ACM6755 ֧��3�������õ�ȫ��������ֱ���oˢ늙C��IC���� 2024-10-09
- YXC�����Q�����������I���C���� 2024-09-27
- ��Դ����͟oԴ����ą^�e 2024-09-24
- ��ģ�K��Ȳ��p����ѕr�lCP-��־��� 2024-09-20
- ���w�C�����Ĺ���ԭ�� 2024-09-19
- YXCʯӢ��Դ��ֿɾ��̾����l�c200MHZ��С���c�ɾ��_����6λ��������5G��վ 2024-09-12
- 70V�͉����{OVP�ֵ���^�����oо-ƽоPW1600 2024-09-05
- YXC�P�d��Դ��Ʒ�l��ح1.2V�����ĕr犽�Q���� 2024-09-05
- YXC�P�d | 32.768KHZ�����x�ͷ��� 2024-09-02
- ���T�˺�
-
���ż����· ������·�D LED ���l�Ŵ����·�D ��Ƭ�C 늙C���� LED�·�D �����Դ �_�P�����Դ ����·�D ׃�l�� ��׃�� LED�����· ���{�S���g LED���·�D AV�Ŵ����· �ص����·�D 555���r�� 늴Št�·�D ���������· 51��Ƭ�C �·�OӋ �^�����o�· �^�����o�· �����· �ھ�Ӌ�� ���˷����· ��·���o�· �ŷ�늙C ���M늙C PIC��Ƭ�C ֱ�������Դ ���{�����Դ EMC ©늱��o�· Ƕ��ʽϵ�y ��Ȧ ���l��׃�� ���� ���{ UPS DC-DC�· �ضȂ����� 늴ż��� ���� ���l�_�P�Դ ���� EMI ��˹�� ���⾀